It would be good to improve some of the current pathfinding behaviors: Pathfinding behavior or NavMesh. The Pathfinding behavior uses the full sprite size to calculate accessibility to the objectives, which makes its implementation very difficult in narrow sections or when the objective is close to an obstacle.
On the other hand, NavMesh behavior, although it uses the collision mask as the basis for route calculations, currently has several errors. One is the aforementioned The rotation speed in the NavMesh behavior cannot be modified, but there are also others. Many times objects with this behavior are stopped in their tracks when they circulate close to an obstacle and do not move again. Also, there are still problems when the target is close to an obstacle because the center of the collision mask must be accessible to the target; otherwise it will not find the route.
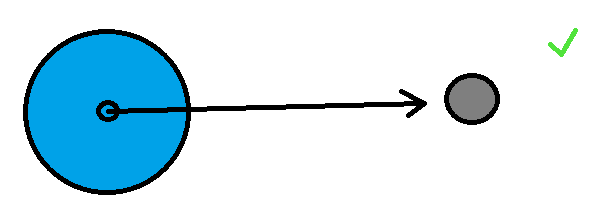
Suppose the larger object must reach the smaller target (gray). When there are no nearby obstacles, both behaviors work well.
Now we see when the objective is close to an obstacle (brown):
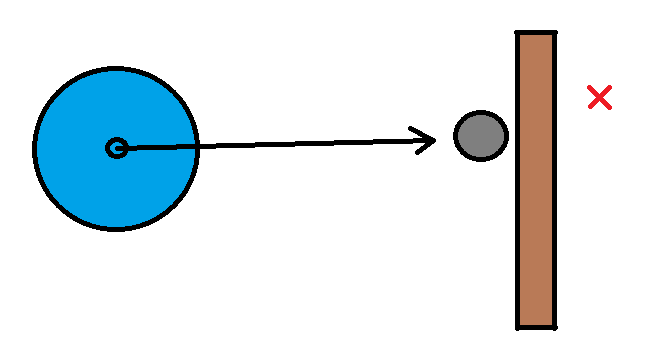
The object with the behavior cannot find its way to the target because by superimposing its center on the target, it would collide with the obstacle. This is an exaggerated example, but it is for graphic purposes. The larger the size of the object with the behavior (Pathfinding or NavMesh), the less possible it is to reach targets close to an obstacle (logically, using Pathfinding the situation is worse because the total size of the sprite is considered as the basis for calculations).
I have managed to partially solve the latter mentioned with some tricks, but the solution is not infallible either.
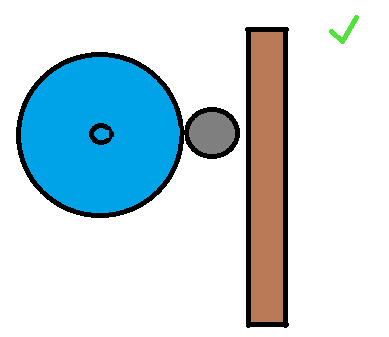
What should ideally happen is that some point of the object with the Pathfinding or NavMesh behavior reaching the target is enough to create the path:
In any case, I know that it is difficult to modify these behaviors to achieve this and maintain well-optimized resource consumption levels. For now, I think that leaving one of the two behaviors (Pathfinding or NavMesh) working well would be a good initial step (using the collision mask as the basis of calculations for Pathfinding or resolving the aforementioned bugs in NavMesh).